diy遥控飞机模型的基本要点-8

飞控
传统飞航模的玩家是不用飞控的,就是纯遥控,享受飞行乐趣,但是这对大多数人来说太难了,不用说控制,就是目视航模姿态都是个大难题。随着技术发展,现在飞控越来越普及,以至于几乎成为标配,最最基本的也会带陀螺仪。飞控主要作用有以下几点:
飞行控制:控制器是飞行器的指挥中心,它接收来自遥控器的指令,并将这些指令转化为电信号发送给舵机、电调等飞行器的执行器,从而控制飞行器的姿态、飞行速度和航向等。通过控制器,飞行员可以实现飞行器的各种动作,如升降、横滚、转向等,以及进行各种飞行模式的切换。
通信传输:控制器充当遥控器和飞行器之间的中介,负责将遥控器发送的无线信号解码,并将信号传输给飞行器的接收器。它确保遥控器和飞行器之间的可靠通信,使飞行员能够实时操控飞行器。
信号处理和稳定性控制:控制器可以对接收到的信号进行处理和调整,以提高飞行器的稳定性和响应性。它可以通过传感器(如陀螺仪、加速度计)获取飞行器的姿态信息,并根据设定的控制算法进行实时调整,使飞行器能够保持平衡和稳定的飞行状态。
参数调节和功能设置:控制器通常具有一些可调节的参数和功能设置,允许飞行员根据实际需求进行调节和优化。例如,可以调整舵机行程、反向设置、飞行曲线、灵敏度等参数,以适应不同的飞行需求和飞行器类型。
高级功能支持:一些先进的控制器还提供了一些高级功能,如舵机混控、自动驾驶、航向保持等。这些功能可以帮助飞行员实现更复杂的飞行动作和任务,提供更多的飞行乐趣和探索空间。
组成
飞控的主要组成部分:
主控芯片(MCU):主控芯片是飞行控制器的核心处理单元,通常采用高性能的微控制器或嵌入式处理器。它负责执行飞行控制算法、处理传感器数据、进行数据计算和决策,并控制执行器以实现飞行控制。
传感器:飞行控制器通常配备多种传感器来获取飞行器的姿态和运动信息。常见的传感器包括陀螺仪(Gyro)、加速度计(Accelerometer)、磁力计(Magnetometer)和气压计(Barometer)。这些传感器可以测量飞行器的姿态、加速度、方向和高度等数据,提供给主控芯片进行飞行控制。
接收器(Receiver):接收器是飞行控制器与遥控器之间的连接设备,接收来自遥控器的无线信号,并将信号传输给飞行控制器。接收器通常通过无线电信号(如2.4GHz频段)与遥控器进行通信,并将接收到的控制指令传递给主控芯片,使飞行控制器能够接收和响应遥控器的操作。
输出接口:飞行控制器通常具有多个输出接口,用于连接执行器,如舵机和电调。通过这些输出接口,主控芯片可以向执行器发送信号,控制飞行器的各个运动部件,例如控制飞机的升降舵、副翼和方向舵等。
电源管理:飞行控制器需要稳定的电源供应,以保证其正常运行。电源管理电路通常包括电源输入接口、稳压电路和电源保护电路,用于管理电池电源或外部电源的供电,并提供稳定的电压和电流给飞行控制器及其相关组件。
数据存储:一些高级的飞行控制器还配备了数据存储设备,如闪存芯片或SD卡槽,用于存储飞行数据、飞行日志和配置文件等。这些数据对于分析飞行性能、回放飞行过程以及调整飞行参数非常有用。
飞行控制器的具体组成和功能会有所差异,但通常都会包含以上这些部分,这里把接收器也算到飞控里,是因为现在基本都集成在一起。一些高级的飞行控制器还可能具备更多的功能和接口,如GPS导航、无线通信、姿态稳定控制等。
开源飞控项目
ArduPilot: ArduPilot是一个非常流行的开源飞控项目,支持多种飞行器类型,包括多旋翼、固定翼和直升机等。它具有强大的功能和广泛的用户社区,提供了自动驾驶、导航、航迹规划等高级功能。
PX4: PX4是一个高性能的开源飞控项目,适用于多种飞行器类型,包括多旋翼、固定翼、垂直起降和VTOL等。PX4具有先进的控制算法和灵活的架构,支持高级功能如航迹规划、避障和计算机视觉导航。
Betaflight: Betaflight是专门针对无人机竞速和Freestyle飞行的开源飞控项目。它提供了高性能的飞行控制和调整功能,支持多种飞行器配置和调谐选项,适合飞行员进行精准操控和快速响应。
Cleanflight: Cleanflight是一个源于Betaflight的开源飞控项目,旨在提供简洁、高性能的飞行控制。它提供了广泛的配置和调整选项,支持多种飞行器类型和飞行模式。
iNav: iNav是一个专注于固定翼飞行器的开源飞控项目,它提供了全功能的导航和自动驾驶功能,适用于长航时和遥感任务等应用。
Paparazzi UAV: Paparazzi UAV是一个开源的无人机自主飞行系统,具有强大的导航和控制功能,适用于多种飞行器类型。
AutoQuad: AutoQuad是一个适用于四旋翼和固定翼飞行器的开源飞控项目,具有高级的飞行控制和导航功能。
APM:Copter: APM:Copter是ArduPilot项目的一个分支,专注于多旋翼飞行器。它提供了丰富的飞行控制和导航功能,适用于各种多旋翼应用场景。
TauLabs: TauLabs是一个开源的飞行控制项目,支持多种飞行器类型,包括多旋翼、固定翼和直升机等。它提供了高级的飞行控制功能和配置选项。
Naze32: Naze32是一款非常流行的开源飞控板,适用于多旋翼飞行器。它具有简洁的设计和易于使用的用户界面,提供了基本的飞行控制功能。
MultiWii: MultiWii是一个开源的多旋翼飞行控制项目,适用于四旋翼、六旋翼和八旋翼等飞行器类型。它具有简单的硬件和软件配置,并支持各种传感器和功能扩展。
Baseflight: Baseflight是一个源自MultiWii的开源飞控项目,专注于多旋翼飞行控制。它提供了稳定的飞行控制和调谐功能,适合新手和中级飞行员使用。
LibrePilot: LibrePilot是一个开源的飞行控制项目,适用于多种飞行器类型,包括多旋翼、固定翼和直升机等。它提供了全面的飞行控制和导航功能,并具备用户友好的配置界面。
OpenPilot: OpenPilot是LibrePilot的前身,是一个基于开源的飞行控制项目。OpenPilot和LibrePilot项目在一段时间内共同发展,后来分道扬镳成为两个独立的项目。
这些开源飞控项目在无人机社区中得到了广泛的使用和认可。它们提供了不同的功能和灵活的配置选项,可以满足各种飞行需求和技术水平。飞行员可以根据自己的喜好和项目需求选择适合的开源飞控项目,并进行定制和配置,以实现理想的飞行控制性能。
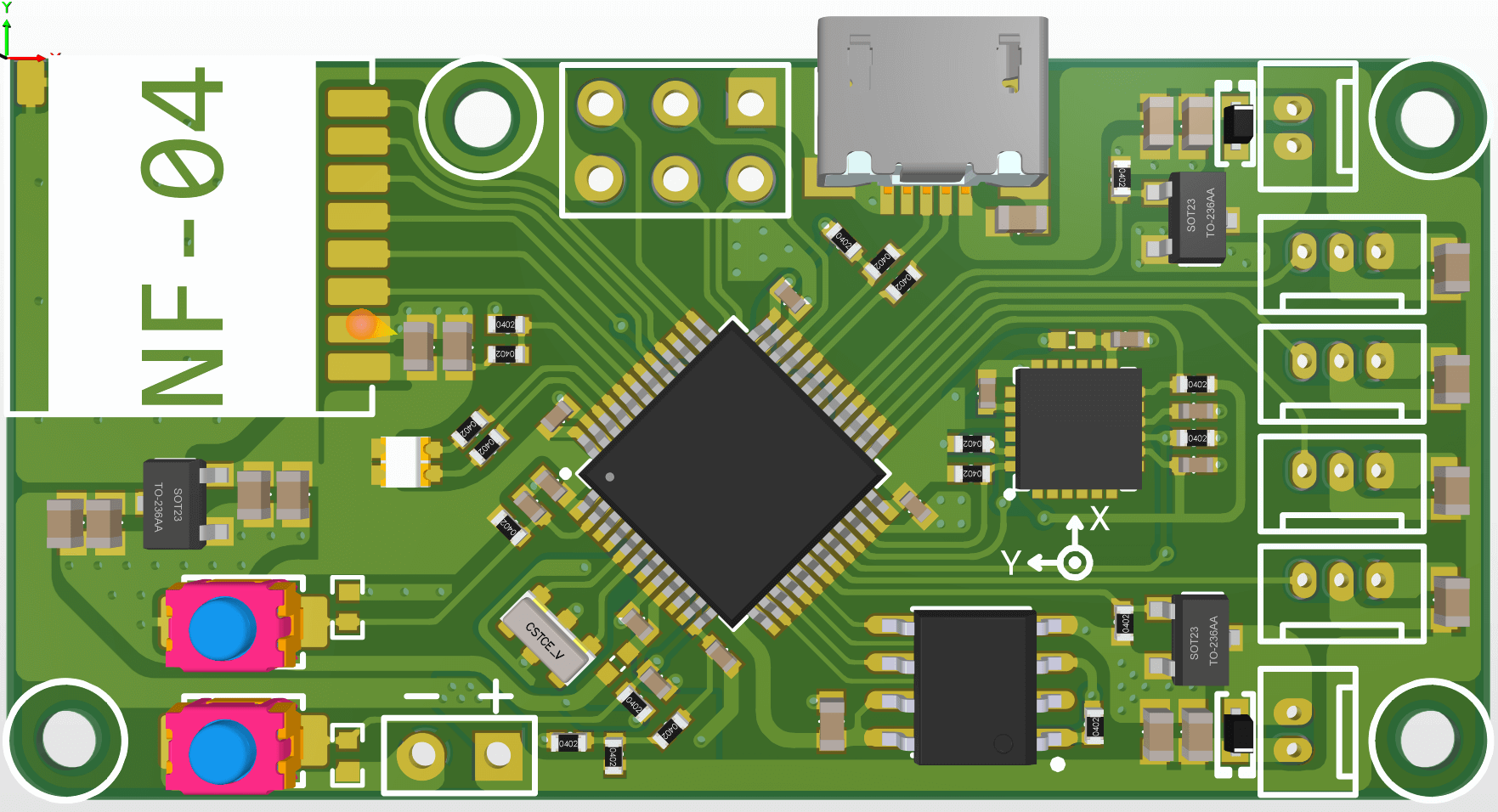
在前面的文章 开源 2.4g 遥控小飞机控制板 曾开源了一个最基本的小飞控的硬件设计,
对于48cm改装来说,这样的硬件资源基本就够了。但是这次改装,还在犹豫到底是用MCU+2.4G模块,还是直接一片ESP32全部搞定。