esp32c3-vscode开发容器配置-1
运行esp32示例程序时注意到右下角有”ESP-IDF QEMU”按钮,好奇,就点了一下,发现这个是与docker开发容器关联的,乐鑫提供了一套docker镜像来进行esp32开发。
在vs code中要先安装”dev container”插件,然后这个插件会自动检测系统环境,完成docker安装。
但是示例程序中的开发容器配置有问题:
运行esp32示例程序时注意到右下角有”ESP-IDF QEMU”按钮,好奇,就点了一下,发现这个是与docker开发容器关联的,乐鑫提供了一套docker镜像来进行esp32开发。
在vs code中要先安装”dev container”插件,然后这个插件会自动检测系统环境,完成docker安装。
但是示例程序中的开发容器配置有问题:
之前的文章 ESP32+MicroPython开发环境的搭建 介绍了ESP32 MicroPython开发环境的搭建,此次计划采用ESP32-C3做小飞机主控,不太适合用MicroPython,要用ESP-IDF原生框架,因为平时一直用vs code编辑器,所以就选了vs code做开发环境。
ESP32-C3 SoC 芯片支持以下功能:
ESP32-C3 采用 40 nm 工艺制成,具有最佳的功耗性能、射频性能、稳定性、通用性和可靠性,适用于各种应用场景和不同功耗需求。
之前为了焊接一些小贴片模块,想过买一个加热台,后来一搜加热台,发现有很多卖PTC加热板的,就又想自己做一个加热台。正好这个月嘉立创又送了打样券,搞起来~
PCB加热台设计主要考虑以下几个方面:

传统飞航模的玩家是不用飞控的,就是纯遥控,享受飞行乐趣,但是这对大多数人来说太难了,不用说控制,就是目视航模姿态都是个大难题。随着技术发展,现在飞控越来越普及,以至于几乎成为标配,最最基本的也会带陀螺仪。飞控主要作用有以下几点:
飞行控制:控制器是飞行器的指挥中心,它接收来自遥控器的指令,并将这些指令转化为电信号发送给舵机、电调等飞行器的执行器,从而控制飞行器的姿态、飞行速度和航向等。通过控制器,飞行员可以实现飞行器的各种动作,如升降、横滚、转向等,以及进行各种飞行模式的切换。
通信传输:控制器充当遥控器和飞行器之间的中介,负责将遥控器发送的无线信号解码,并将信号传输给飞行器的接收器。它确保遥控器和飞行器之间的可靠通信,使飞行员能够实时操控飞行器。
信号处理和稳定性控制:控制器可以对接收到的信号进行处理和调整,以提高飞行器的稳定性和响应性。它可以通过传感器(如陀螺仪、加速度计)获取飞行器的姿态信息,并根据设定的控制算法进行实时调整,使飞行器能够保持平衡和稳定的飞行状态。
参数调节和功能设置:控制器通常具有一些可调节的参数和功能设置,允许飞行员根据实际需求进行调节和优化。例如,可以调整舵机行程、反向设置、飞行曲线、灵敏度等参数,以适应不同的飞行需求和飞行器类型。
高级功能支持:一些先进的控制器还提供了一些高级功能,如舵机混控、自动驾驶、航向保持等。这些功能可以帮助飞行员实现更复杂的飞行动作和任务,提供更多的飞行乐趣和探索空间。
遥控器和接收器在遥控飞机模型中起着至关重要的作用。它们是飞行器与操控者之间的桥梁,负责实现操控信号的传输和接收,从而让飞行器能够执行各种飞行动作和指令。以下是遥控器和接收器的主要功能:
控制飞行器:遥控器是操控者与飞行器之间的交互界面。通过遥控器上的摇杆、按钮和开关等控制元素,操控者可以发送指令和控制信号,控制飞行器的起飞、降落、姿态调整、方向控制等动作。遥控器的精确性和响应性直接影响着飞行器的操控体验和飞行性能。
传输信号:接收器是接收遥控器发出的信号,并将其转化为电信号传递给飞行器的关键组件。它负责将遥控器发出的指令信号转化为电子信号,通过无线信号传输到接收器上,并将信号传递给飞行器上的相应执行器,如电机、舵机等,从而实现飞行器的各项动作和操作。
稳定性和安全性:遥控器和接收器的稳定性和可靠性对于飞行器的安全性至关重要。它们必须能够在各种环境条件下提供稳定的信号传输和接收,避免信号丢失或干扰导致飞行器失控或意外情况发生。稳定的信号传输和接收可以确保操控者对飞行器的实时控制和反馈,增加飞行的可控性和安全性。
功能扩展和个性化:一些先进的遥控器和接收器提供了丰富的功能扩展和个性化设置选项。它们可能支持多通道控制,允许操控者对飞行器的不同部分进行独立控制。此外,一些遥控器还提供了可调的飞行参数和飞行模式,以满足操控者对飞行器性能和飞行体验的个性化需求。
电池是一种能够将化学能转化为电能的装置,常用于为各种电子设备供电。以下是一些常见的电池种类及其特点:
碱性电池(Alkaline Battery):碱性电池是最常见的消费类电池,常用于家庭用途和便携式设备。它们具有相对较高的能量密度,较长的储存寿命和较低的自放电率。碱性电池通常以AA、AAA、C、D等尺寸供应。
锂离子电池(Lithium-ion Battery):锂离子电池是一种高性能电池,广泛应用于智能手机、笔记本电脑、相机等设备中。它们具有较高的能量密度、较轻的重量和较长的寿命。锂离子电池还具有无记忆效应,可以在充放电过程中灵活使用。
镍镉电池(Nickel Cadmium Battery):镍镉电池具有较高的充放电循环寿命和较强的耐用性。它们在一些特定应用中仍然广泛使用,如无线电话、电动工具等。然而,镍镉电池有一定的自放电率,并且含有有害物质,对环境有一定影响。
镍氢电池(Nickel Metal Hydride Battery):镍氢电池是镍镉电池的改进型,具有更高的能量密度和较低的有害物质含量。它们在一些可再充电设备中使用,如数码相机、遥控器等。
铅酸电池(Lead-acid Battery):铅酸电池是一种较为成熟和经济实惠的电池类型,常用于汽车起动电池和UPS(不间断电源)等应用中。它们具有较高的承载能力和较低的成本,但比较笨重。
锂聚合物电池(Lithium Polymer Battery):锂聚合物电池是一种轻薄、柔性和高能量密度的电池。它们通常用于一些特殊应用,如无人机、遥控飞机和便携式电子设备等。
飞控仿真是一种在计算机模拟环境中对飞行控制系统进行测试和验证的方法。它通过使用仿真软件和工具来模拟飞行器的物理行为、传感器数据和控制算法的执行,以评估飞行控制系统的性能和稳定性。
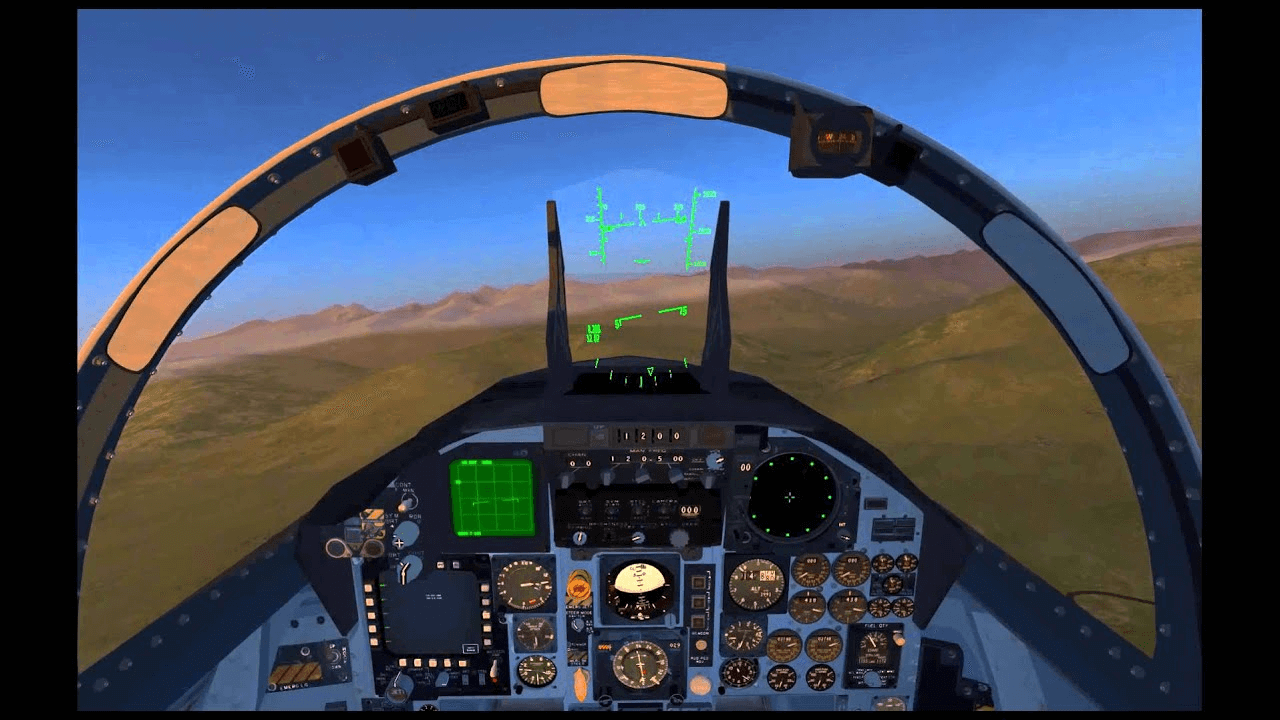
如今模拟器对于航空模型爱好者来说是必不可少的,无论是初学者建立条件反射,还是进阶者学习新的特技动作,或是老手的自娱自乐,模拟器都以其为0的炸机成本和丰富多彩的机型给航模爱好者带来极大的便利。模型飞机在空中飞行千变万化,了解过有限元分析的朋友们应该知道,分析简单情况下的一个小部件都可以让主流配置的电脑计算数小时,所以模拟器中的飞机并不能完全实时的按照空气动力学仿真来计算,模拟器往往采用比较简易的物理引擎来简化模拟运算飞行过程,这个物理模拟效果直接决定了模拟器的手感是否真实,对飞行训练的辅助是否有效。
市面上能见到的模拟器主要有RealFlight系列、凤凰系列、Aerofly系列、XTR系列、FMS系列。其中后两种因为年代久远,画质较差,逐渐淡出了大家的视野,此次介绍上述前三种如今主流的模拟器,因为本人擅长固定翼,故只评价三款模拟器中固定翼模型飞机的手感。
在2010年前,凤凰以其大量的与现实厂家生产对应的模型(地平线、亚拓等)、不错的画质、拥有较多的玩法、可联机等特点迅速受到大家的欢迎,可是到了10年后其余两家模拟器大厂逐渐发力,凤凰的进步显得较小,如今官方已经停止服务和支持。以如今的标准来看,凤凰的优点是软件体积小、飞机数量种类很多、对电脑配置要求不高且同时能提供不错的画质。缺点方面凤凰里的固定翼模型飞机手感较粗糙,打舵时飞机姿态运动不真实,飞机漂浮性过于好,个人认为只能胜任新手形成打舵的条件反射和偶尔当做游戏进行娱乐飞行
电调(Electronic Speed Controller,简称ESC)是遥控飞机中的一种关键设备,用于控制电动马达的转速和方向。下面是关于电调的一些知识:
电调的核心是电子电路和控制芯片。当接收机发送油门信号时,电调将其转化为控制马达转速的电流信号。电调通过调整电流的频率和占空比来控制马达的转速和方向。