卡尔曼滤波
在 飞行器姿态计算 中,卡尔曼滤波是最常用的姿态计算方法之一。今天就以目前的理解讲以下卡尔曼滤波。
先用一个日常生活中的例子来解释下卡尔曼滤波。
假设你正在驾驶一辆汽车并使用GPS导航系统。然而,你可能会注意到,GPS定位有时会出现一些误差,导致导航系统显示的位置与实际位置存在差异。卡尔曼滤波就可以用来解决这个问题。
在这个例子中,我们可以将卡尔曼滤波器视为一种数据处理技术,用于融合GPS定位数据和车辆本身的运动模型,从而更准确地估计车辆的位置和速度。
在 飞行器姿态计算 中,卡尔曼滤波是最常用的姿态计算方法之一。今天就以目前的理解讲以下卡尔曼滤波。
先用一个日常生活中的例子来解释下卡尔曼滤波。
假设你正在驾驶一辆汽车并使用GPS导航系统。然而,你可能会注意到,GPS定位有时会出现一些误差,导致导航系统显示的位置与实际位置存在差异。卡尔曼滤波就可以用来解决这个问题。
在这个例子中,我们可以将卡尔曼滤波器视为一种数据处理技术,用于融合GPS定位数据和车辆本身的运动模型,从而更准确地估计车辆的位置和速度。
飞书是字节跳动推出的一款企业级通讯及协作平台,于2016年正式上线。它是一款基于云计算技术的软件工具,可以帮助企业实现快速高效的沟通和协作,提升工作效率,降低沟通成本。下面将详细介绍飞书的功能、特点以及使用体验。
即时通讯:支持文字、语音、图片、文件等多种形式的即时通讯,可以随时随地与同事进行交流。
视频会议:支持多人视频会议,可以远程参加会议,方便快捷。
云盘:提供企业级云盘服务,可以在线上存储和共享文件,方便团队协作。
任务管理:可以创建任务并分配给不同的成员,设置截止日期和进度等信息,方便团队协同完成任务。
日程管理:可以创建个人或团队的日程表,设置提醒时间,方便掌握工作安排。
审批流程:可以创建审批流程,设置审批人、审批条件等信息,方便管理工作流程。
数据分析:提供数据分析功能,可以根据数据生成报表和图表,帮助企业进行决策。
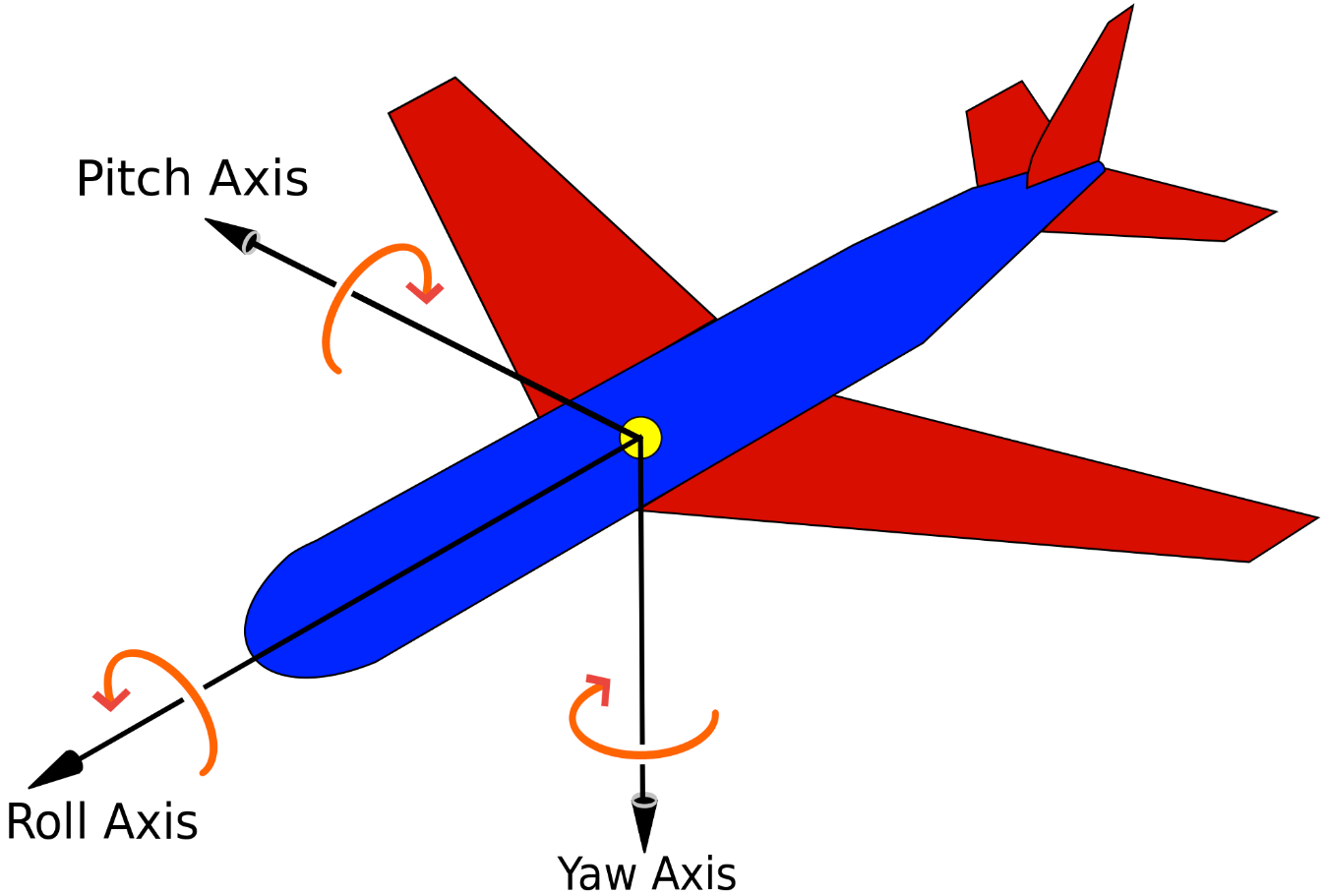
在飞行器的控制中,姿态计算是至关重要的一步。姿态计算的目标是确定飞行器相对于参考坐标系的姿态,通常以欧拉角(滚转、俯仰和偏航)或四元数的形式表示。
说到运放,是离不开共模、差模、虚短、虚断这些概念的。大家可以想一下运放是怎么设计出来的。
我们想下前面提到的电流源,就是将电压信号转为电流源。然后电流源串一个大电阻,就得到一个电压。这中间的电流源起到中转的作用。运放内部就是利用三极管对电流源进行控制的。运放内部设计思想也是通过这种思路一步一步演变来的。
总结下运放设计思想的三部曲吧:
惯性导航(Inertial Navigation System,简称INS)是一种基于惯性测量单元(Inertial Measurement Unit,简称IMU)的导航系统,用于确定飞行器的位置、速度和姿态。
在飞机的惯导系统中,通常会使用三轴加速度计和三轴陀螺仪作为IMU的主要传感器。加速度计用于测量飞行器的加速度,并通过积分计算速度和位置。陀螺仪则用于测量飞行器的角速度,并通过积分计算姿态。
在计算机中,信息的表示和处理都是以数字为基础的,而寻址和存储又都是以字节为单位,那么对于跨越多字节的程序对象,我们必须建立两个规则:这个对象的地址是什么,以及在内存中如何排列这些字节。在几乎所有的机器上,多字节对象都被存储为连续的字节序列,对象的地址为所使用字节中最小的地址。例如,假设一个类型为 int 的变量 x的地址为 0x100,也就是说,地址表达式 &x 的值为 0x100。那么,(假设数据类型 int 为32 位表示)x的 4 个字节将被存储在内存的 0x100、0x101、0x102 和 0x103 位置。
在之前的文章 DCDC 降压芯片基本原理及选型主要参数介绍 中已经大致讲解了dcdc降压电路的工作原理,今天再结合仿真将buck电路工作过程讲一讲。
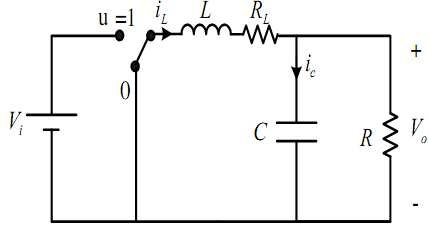
上图为buck电路的基本拓扑结构,开关打到1,电感充电;开关打到0,电感放电。通常认为电感和电容都是储能元件,但是电感的充放电是有能量形式的转换的,充电时电场 → 磁场,放电时磁场 → 电场。
接下来,我们结合仿真来看看buck电路的具体工作过程。
完成效果:
资料中包含了PCB和参考的小飞机模型,我当时是用某宝上几块钱的手抛小飞机改装的,需要一定的动手能力。